{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.manongdao.com/data/attach/logo/logo.png', '推荐 兄弟一词,经得起流年. 的问题《ubuntu打开程序出现段错误(核心已转储)》','https://www.manongdao.com/q-20213.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
各位老师、学者、同门师兄师姐们好:
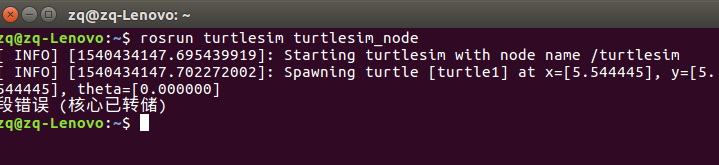
我最近在ubuntu16.04上面使用ros打开小海龟界面节点程序的时候出现了以上这个错误,段错误(核心已转储),这个错误发生的毫无预兆,前几秒都能正常打开,无缘无故出现了这个问题,想请教你们关于这方面的解答,我是一个电脑小白,对于编程了解较浅,没有数据结构的知识,谢谢你们。
相关问题
- How can I embed another software in my qt window i
- ROS, opencv3 and CMake - unable to remove the libr
- Drone's motion is unstable with ROS topics
- Cmake not detecting boost-python when installing R
- Add CUDA to ROS Package
相关文章
- How would you publish a message in ROS of a vector
- Kinect / Primesense (Xtion) ROS Ubuntu through Vir
- Import OpenCV Mat into C++ Tensorflow without copy
- 如何启动一个节点,在ROS2参数?(How to launch a node with a para
- 使用rostopic酒馆时发布/订阅的问题(Publisher/Subscriber issues
- 关于Python并行处理[复制](Parallel Processing on Python [du
- ROS水电opencv2“catkin_make”期间链接错误(ROS hydro opencv2
- 罗斯动态配置文件(Ros Dynamic Config file)
sudo apt-get update
sudo apt-get upgrade根据软件数据库的版本进行软件更新。
执行了以上两个步骤之后便可以打开小海龟程序节点了